Published in IEEE Transactions on Intelligent Transportation System Conference, 2024
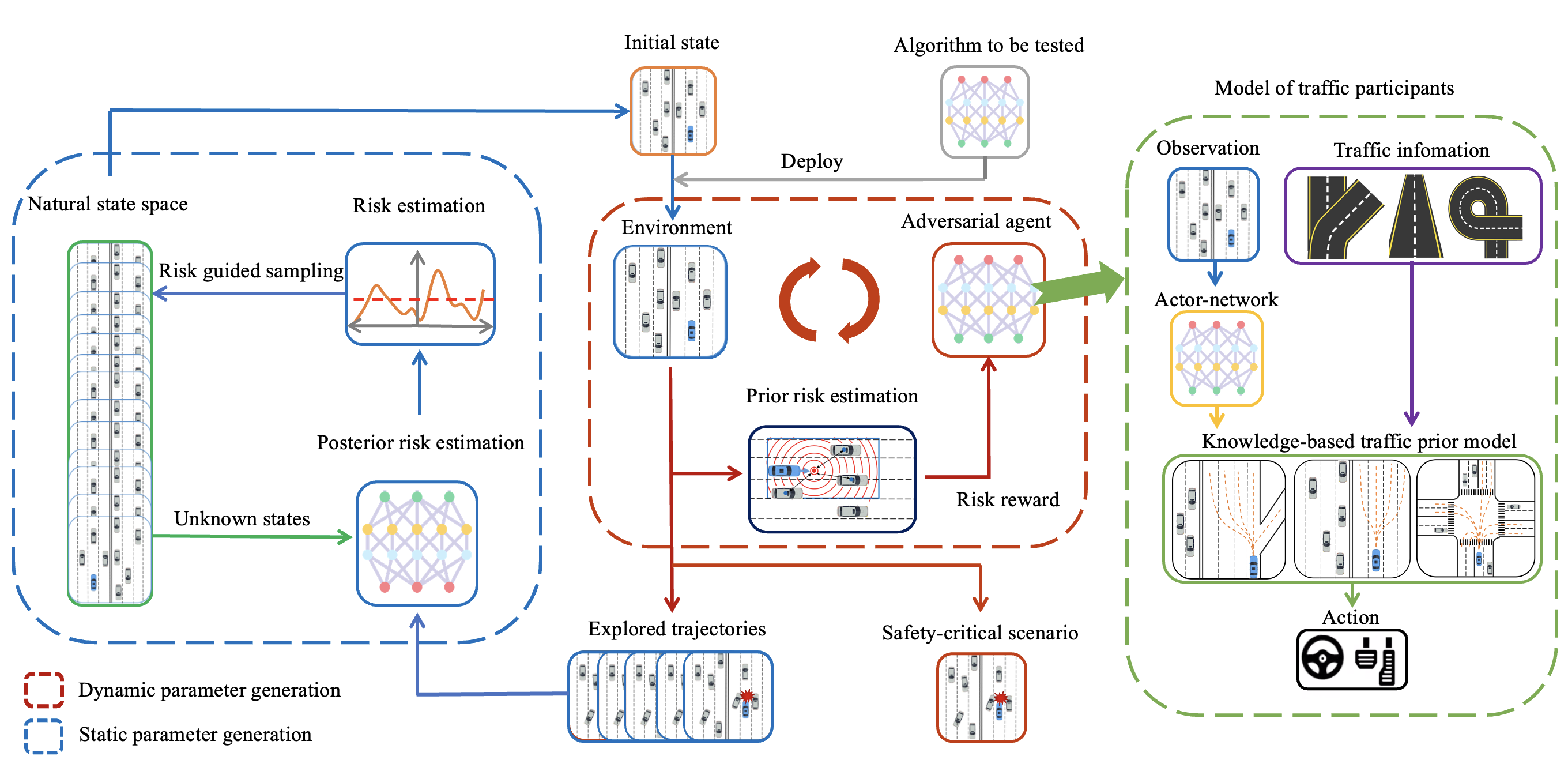
Due to the rarity of safety-critical scenarios, the safety of autonomous driving decision-making algorithms cannot be fully guaranteed in open environments, which limits their further applications. Therefore, it is crucial to efficiently generate such scenarios for the safety validation of autonomous driving algorithms. To improve the generation efficiency of safety-critical scenarios, we propose an efficient safety-critical scenario generation method combining dynamic and static parameters that constitute a scenario by alternating the optimization of them.To generate dynamic scenario parameters efficiently, a traffic participants model integrating reinforcement learning and prior traffic knowledge is proposed, which is then optimized under the guidance of a prior risk estimation model. For the generation of static scenario parameters, a posterior risk estimation model is proposed, which learns from the explored parameter trajectories during the dynamic scenario generation, to estimate the risk of unknown states. Finally, three different efficiency metrics are proposed and experiments are conducted on rule-based, optimization-based, and learning-based autonomous driving algorithms to verify the high efficiency and generality of the proposed method.Compared with the baseline model that only considers dynamic parameters, the proposed method averagely improves the generation speed by 151.8% and the success rate by 78.7% with only a few alternate optimizations. In addition, the method is generalizable for different types of autonomous driving algorithms. The safety-critical scenario generation paradigm proposed in this paper can greatly accelerate the safety evaluation for any given algorithm, which is of great significance for the development of autonomous driving.