
Publications
Generation of Safety-Critical Scenarios Combining Dynamic and Static Scenario Parameters
Zhaoyi Wang, Xincheng Li, Dengwei Wei, Liwen Wang, Yanjun Huang
Published in IEEE Transactions on Intelligent Vehicle (IEEE T-IV, JCR Q1), 2024.5
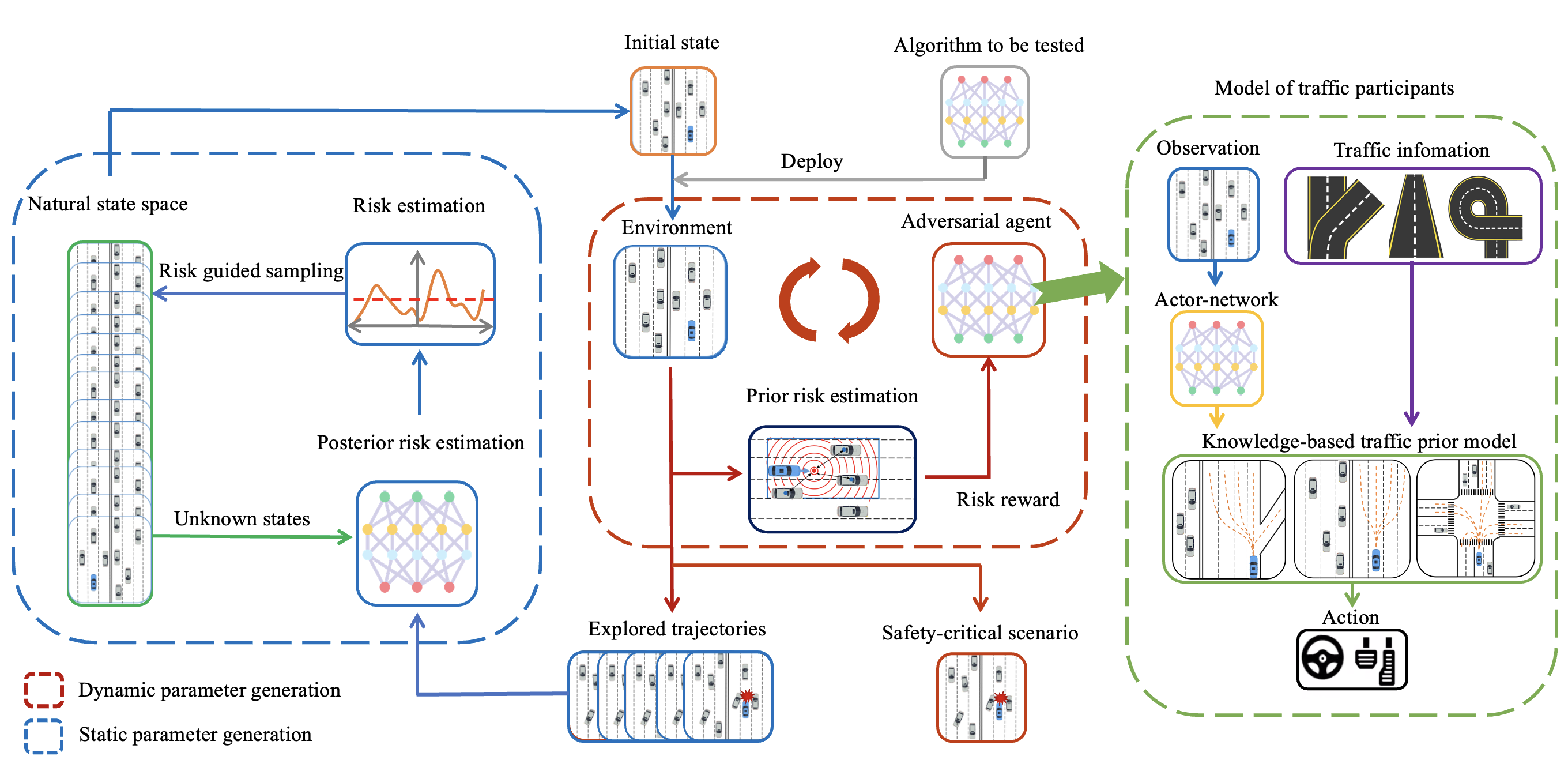
Introduction: Safety-critical scenarios are essential for the safety evaluation of autonomous vehicles. To improve the efficiency of scenario generation, we propose an efficient safety-critical scenario generation method combining dynamic and static parameters that constitute a scenario by alternating the optimization of them. The proposed method enables more efficient, diverse, generalized, and plausible scenario generation with less time and arithmetic cost.
A Survey on Self-evolving Autonomous Driving: a Perspective on Data Closed-Loop Technology
Xincheng Li, Zhaoyi Wang, Yanjun Huang, Hong Chen
Published in IEEE Transactions on Intelligent Vehicle (IEEE T-IV, JCR Q1), 2023.9
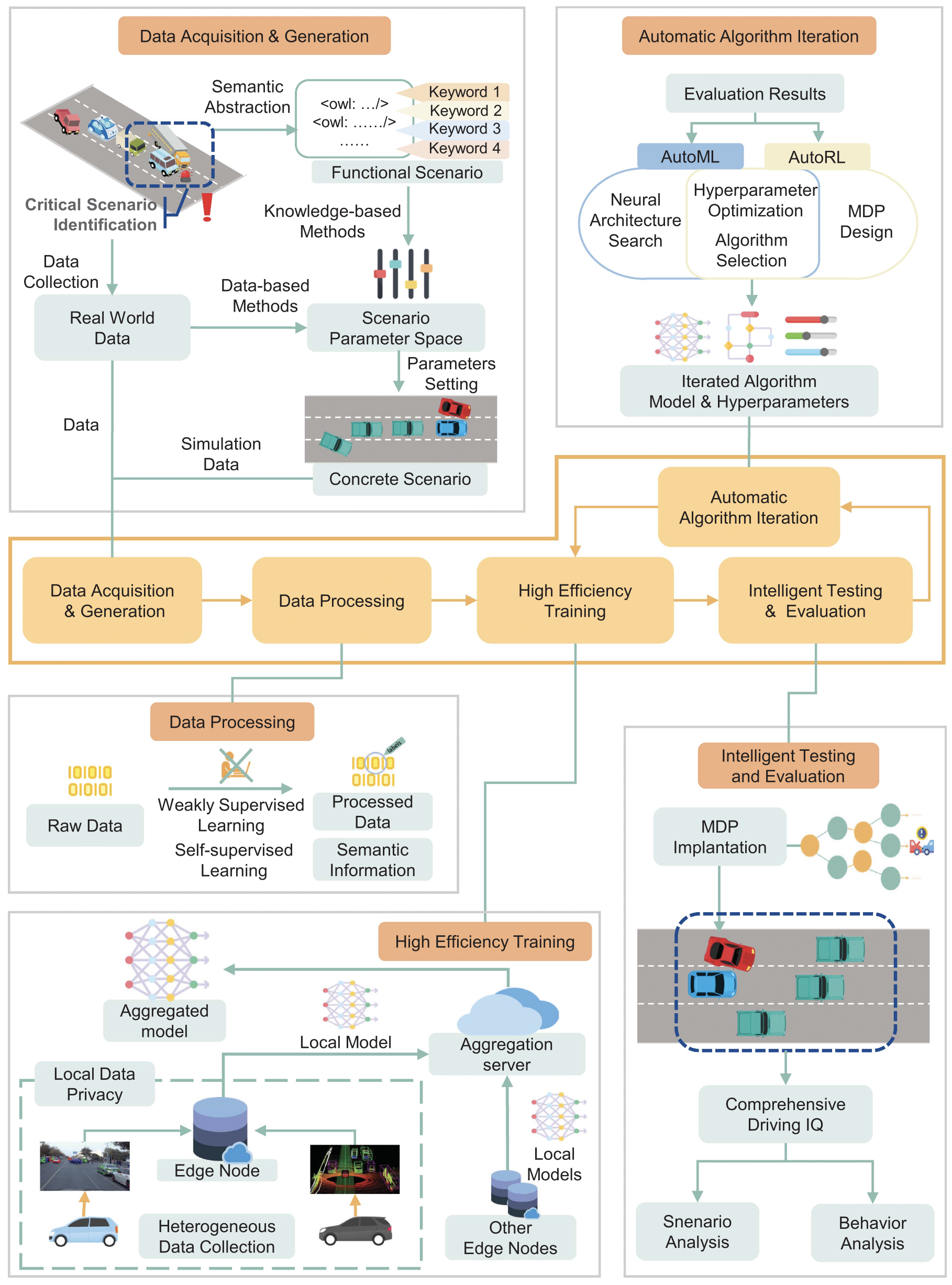
Introduction: Self-evolution refers to the ability of a system to evolve autonomously towards a better performance, which is a potential trend for autonomous driving systems based on self-learning approaches. This study analyzes some relevant technologies and then proposes a novel design mechanism to guarantee the self-evolving performance for autonomous driving systems. Moreover, we give some suggestions for its future directions for self-evolving autonomous driving, including some more cutting-edge technologies that can be incorporated into the DCL architecture.
Safety Boundary Online Identification for Autonomous Vehicle Considering Long-tailed Distribution
Zhaoyi Wang, Jialei Nie, Xincheng Li, Yanjun Huang
Submitted to IEEE Transactions on Intelligent Transportation System (IEEE T-ITS, JCR Q1), under review.
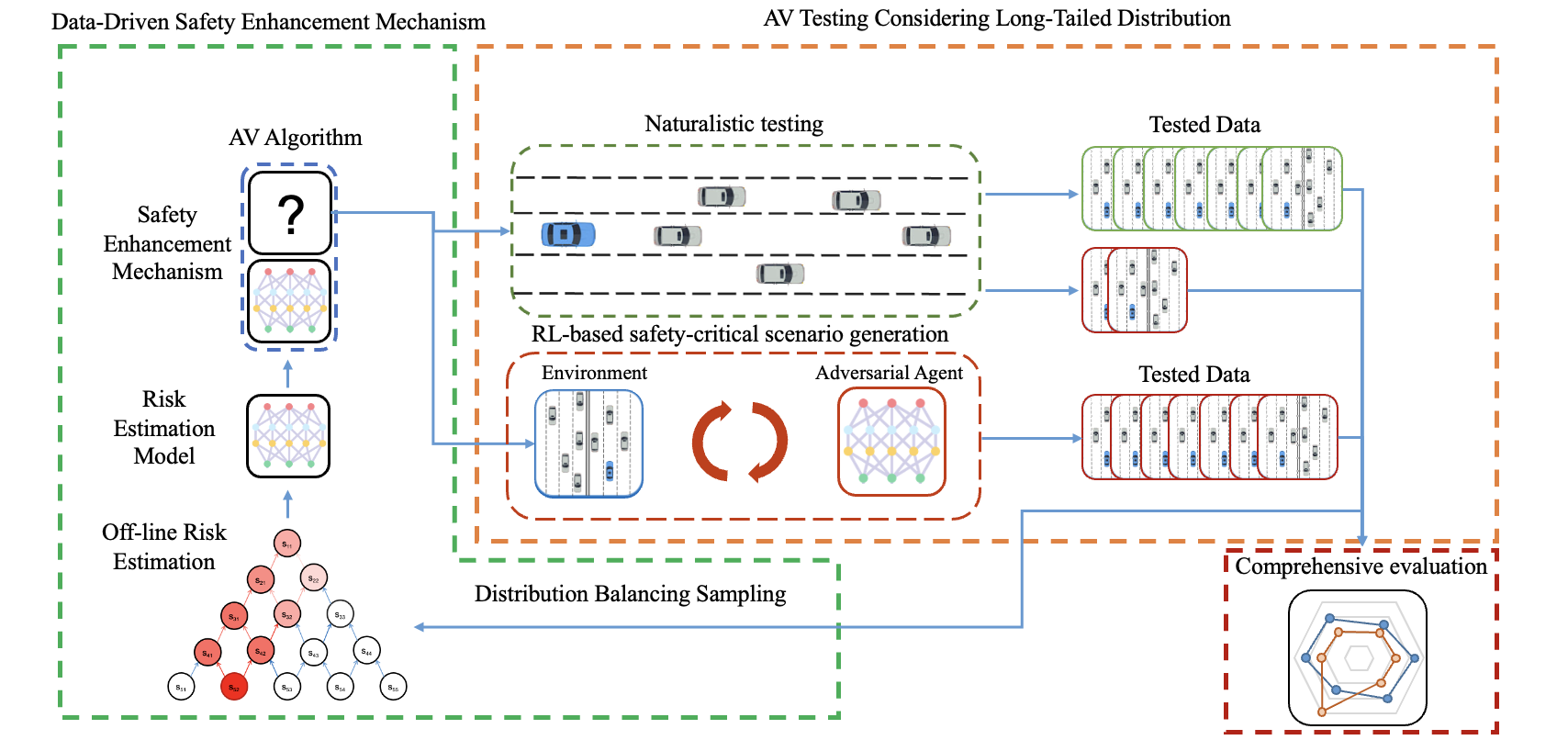
Introduction: The real world is in long-tailed distribution and thus has higher unknowns and complexity. Therefore the safety of decision-making algorithms cannot be fully guaranteed. We propose an online identification method of safety boundaries for arbitrary algorithms to improve their safety in long-tailed distribution. Experiment shows that the proposed method can greatly improve the safety of vehicle when facing unknown and complex scenarios with long-tailed distribution.
Safety Evaluation of Autonomous Driving based on Safety-Critical Scenario Generation
Zhaoyi Wang, Xincheng Li, Shuo Yang, Shizhen Li, Jiatong Du, Xinyu Zhang, Yanjun Huang
Submitted to IEEE Intelligent Transportation System Conference (IEEE ITSC), under review.
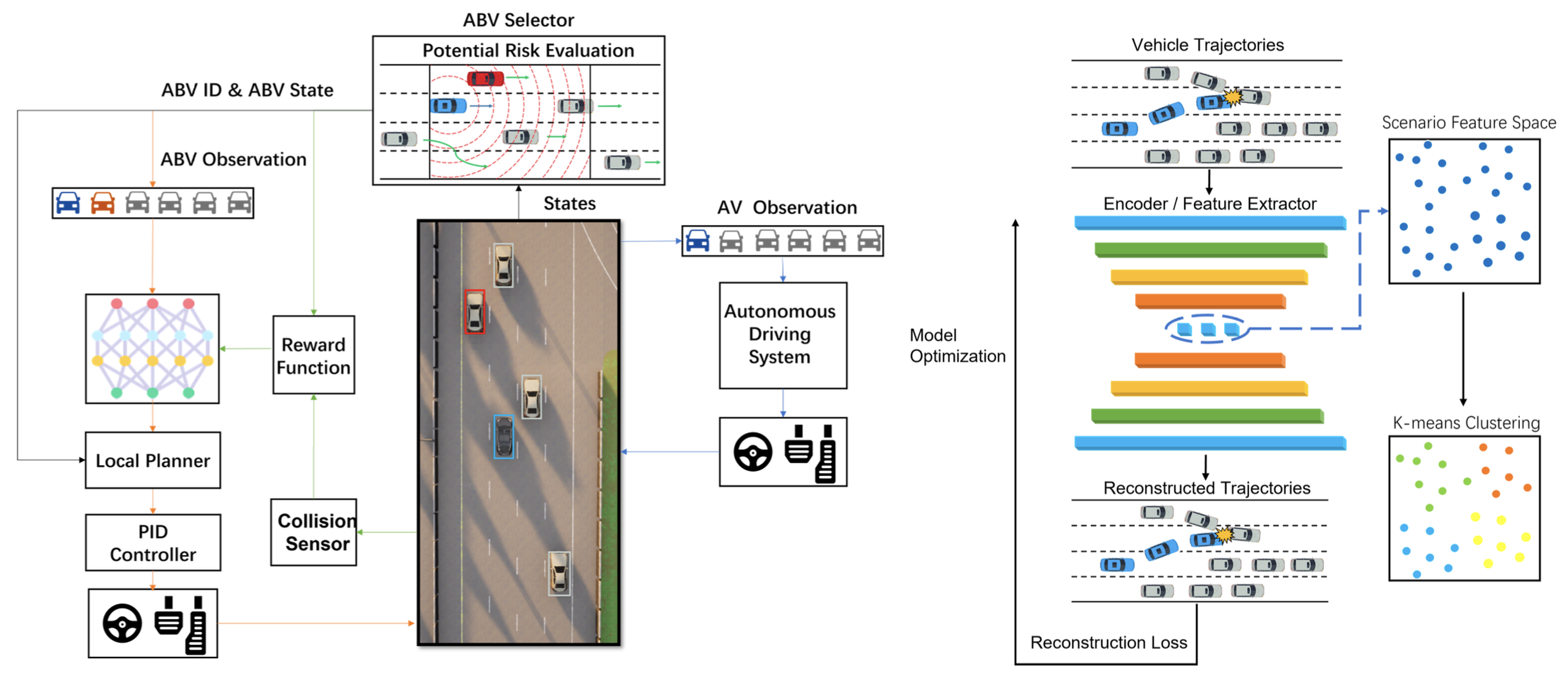
Introduction: The real world is long-tailed distribution and thus has higher unknowns and complexity. Therefore the safety of decision-making algorithms cannot be fully guaranteed. We propose an online identification method of safety boundaries for arbitrary algorithms to improve their safety in long-tailed distribution. Experiment shows that the proposed method can greatly improve the safety of vehicle when facing unknown and complex scenarios with long-tailed distribution.
A Safety-Critical Scenario Generation Software for Autonomous Driving Decision-Making Algorithm
Zhaoyi Wang, Xincheng Li, Dengwei Wei, Liwen Wang, Yanjun Huang
Software Copyright, under review
Introduction: We designed a software to generate safety-critical scenarios for the evaluation of autonomous driving decision-making algorithms. Given the map information, traffic rule information, and traffic density information of the test scenarios, the software can quickly generate reasonable, realistic, and diverse safety-critical scenarios for any autonomous driving algorithms, which is conducive to the comprehensive evaluation of algorithm performance.
Closed-loop Self-Evolving Autonomous Driving Software
Xincheng Li, Jing Min, Zhaoyi Wang, Dengwei Wei, Jiatong Du
Software Copyright, under review
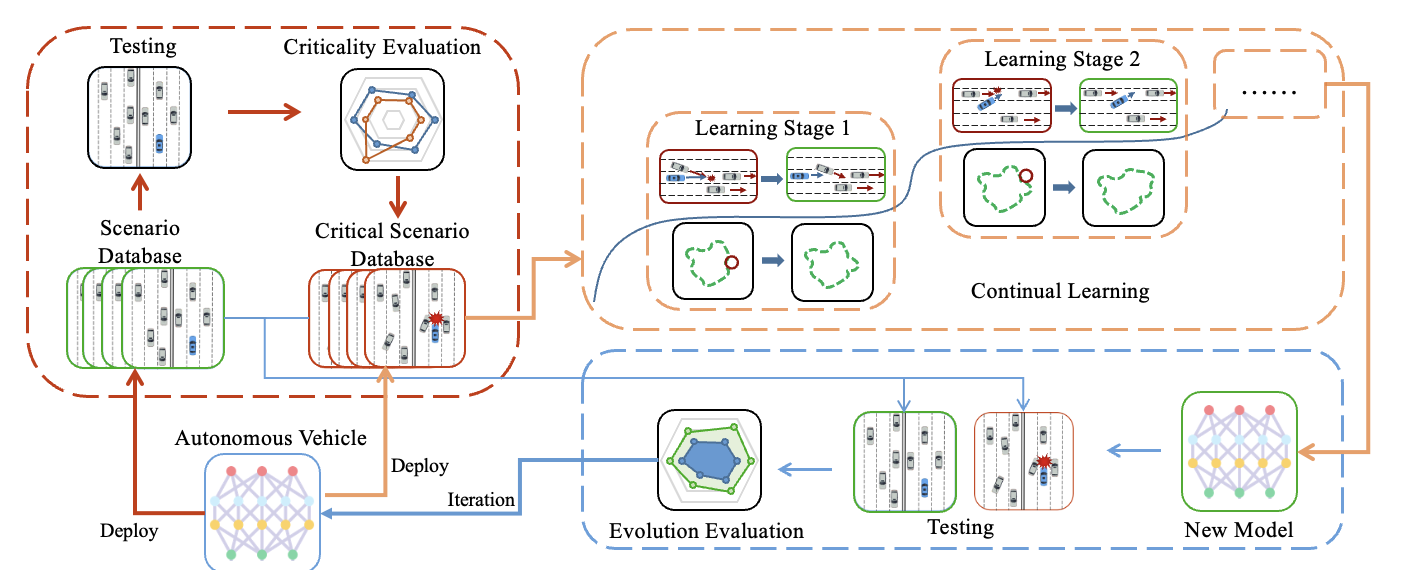
Introduction: Real-world scenarios are endless. Therefore, a good algorithm should be able to continuously explore safety-critical scenarios and learn from them to achieve self-evolving. We propose a self-evolve mechanism for autonomous driving algorithms, which provides training data through a deep reinforcement learning-based safety-critical scenario generation method, and achieves continuous improvement of the algorithm by continual reinforcement learning method with curriculum learning.
A Safety-Critical Scenario Generation Method for Autonomous Driving Decision-Making Algorithm
Zhaoyi Wang, Xincheng Li, Dengwei Wei, Liwen Wang, Yanjun Huang
Chinese Patent, under review
Introduction: We propose a safety-critical scenario generation method for autonomous driving decision-making algorithms. Given any traffic map and traffic rules, this method can quickly generate high-quality safety-critical scenarios by alternating the dynamic and static parameter optimization, quickly exposing the weakness of the given algorithm and facilitating the comprehensive evaluation of autonomous vehicles.
Co-HTTP: Cooperative Trajectory Prediction with Heterogeneous Graph Transformer for Autonomous Vehicles
Xinyu Zhang, Zewei Zhou, Yangjie Ji, Jiaming Xing, Zhaoyi Wang, Yanjun Huang
Submitted to IEEE Intelligent Transportation System Conference (IEEE ITSC), under review.
Introduction:
Safety-Critical Scenario Generation Considering Global Diversity
Zhaoyi Wang, Peilun Han, Xincheng Li, Yanjun Huang
underwriting
Introduction: The diversity of safety-critical scenarios is important for a comprehensive evaluation of autonomous vehicles. I am now working on the essential quantification of the diversity of scenarios and its combination with the safety-critical scenario generation method.