
Sitemap
A list of all the posts and pages found on the site. For you robots out there is an XML version available for digesting as well.
Pages
Posts
Future Blog Post
Published:
This post will show up by default. To disable scheduling of future posts, edit config.yml and set future: false.
Blog Post number 4
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Blog Post number 3
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Blog Post number 2
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Blog Post number 1
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
portfolio
publications
Efficient Generation of Safety-Critical Scenarios Combining Dynamic and Static Scenario Parameters
Published in IEEE Transactions on Intelligent Vehicle, 2024
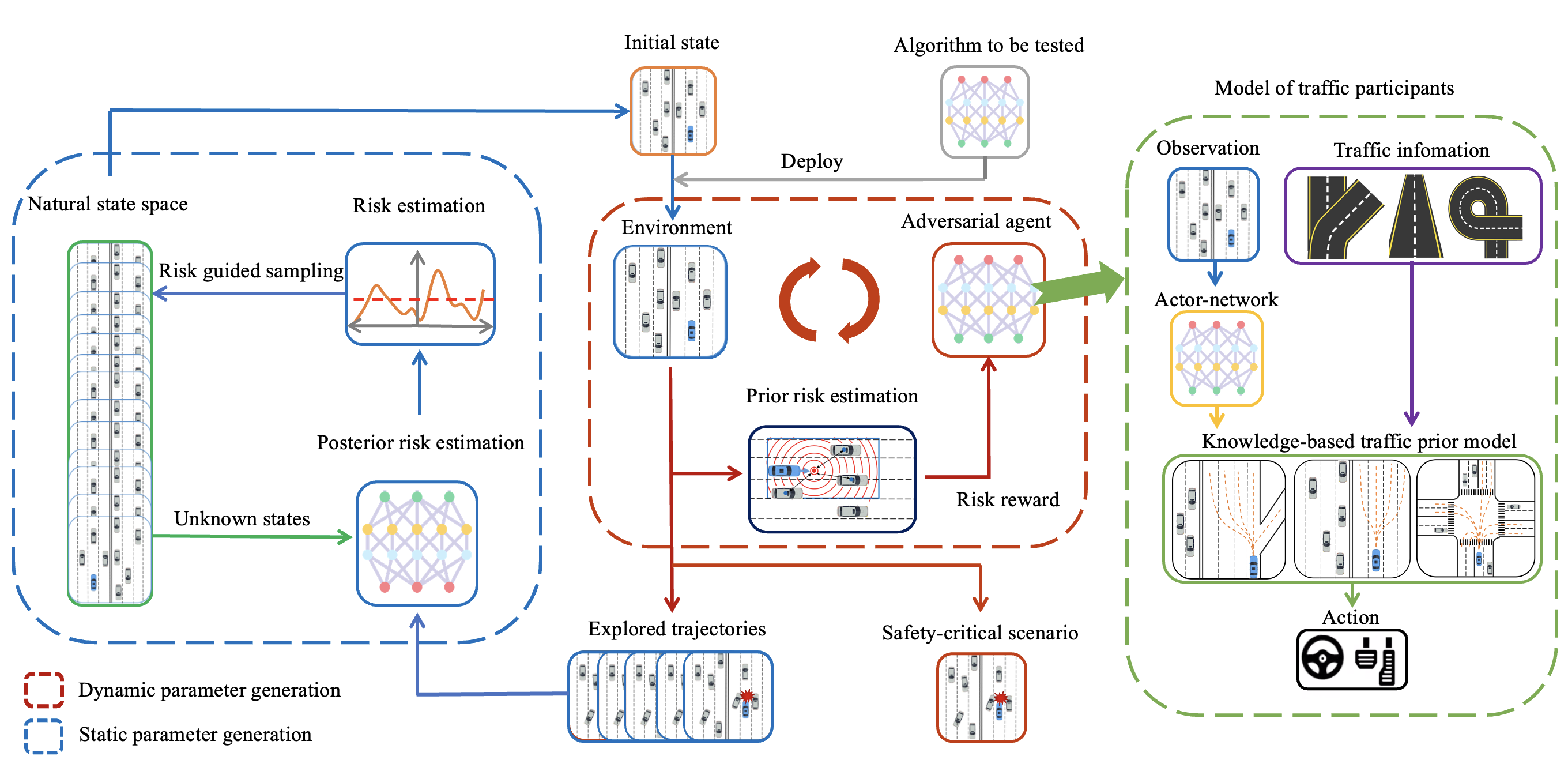
Safety-critical scenarios are essential for the safety evaluation of autonomous vehicles. To improve the efficiency of scenario generation, we propose an efficient safety-critical scenario generation method combining dynamic and static parameters that constitute a scenario by alternating the optimization of them. The proposed method enables more efficient, diverse, generalized, and plausible scenario generation with less time and arithmetic cost.
A Survey on Self-evolving Autonomous Driving: a Perspective on Data Closed-Loop Technology
Published in IEEE Transactions on Intelligent Vehicles, 2024
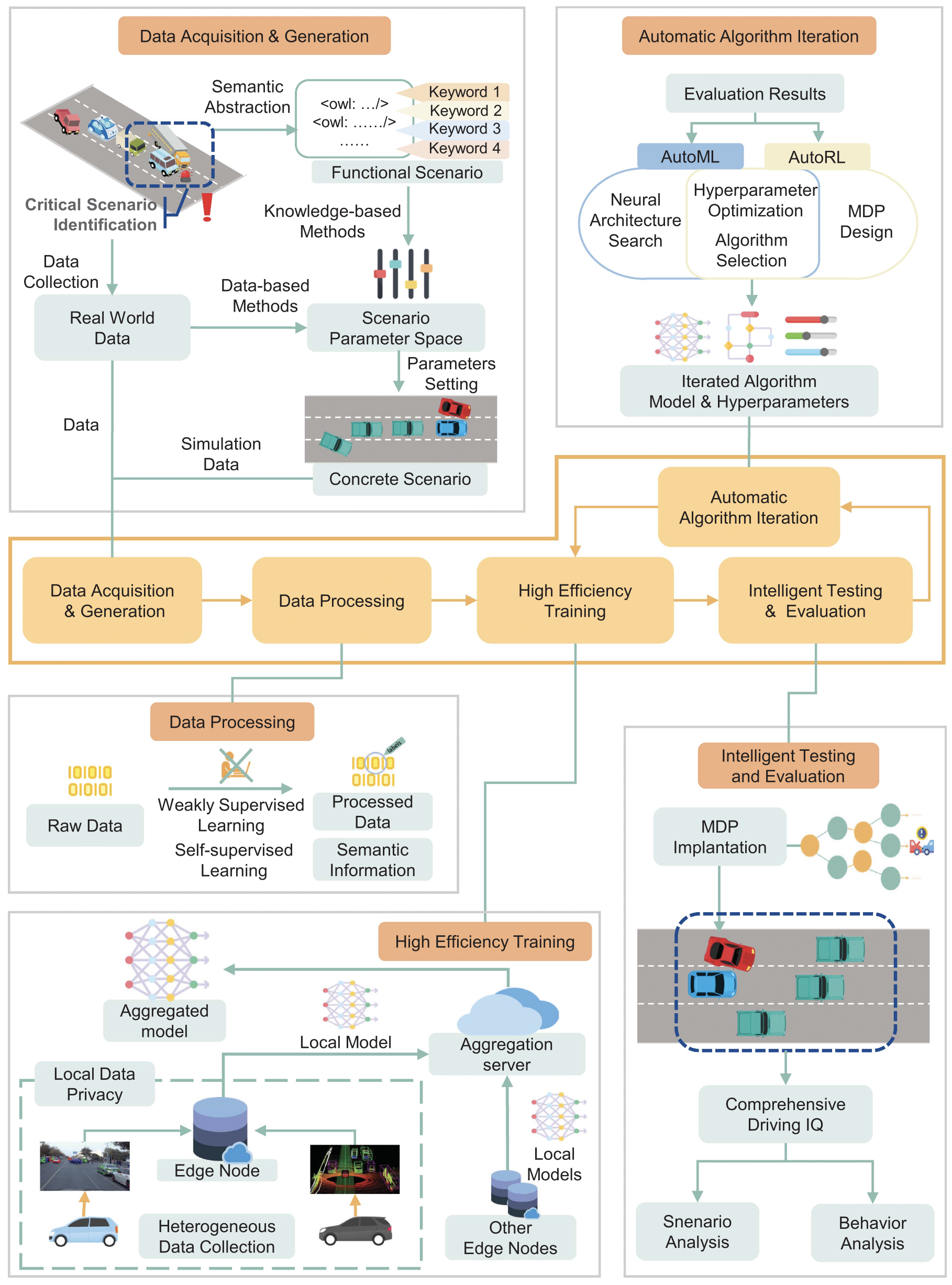
Self-evolution refers to the ability of a system to evolve autonomously towards a better performance, which is a potential trend for autonomous driving systems based on self-learning approaches. This study analyzes some relevant technologies and then proposes a novel design mechanism to guarantee the self-evolving performance for autonomous driving systems. Moreover, we give some suggestions for its future directions for self-evolving autonomous driving, including some more cutting-edge technologies that can be incorporated into the DCL architecture.
Safety Boundary Online Identification for Autonomous Vehicle Considering Long-tailed Distribution (Under Review)
Published in IEEE Transactions on Intelligent Transportation System, 2024
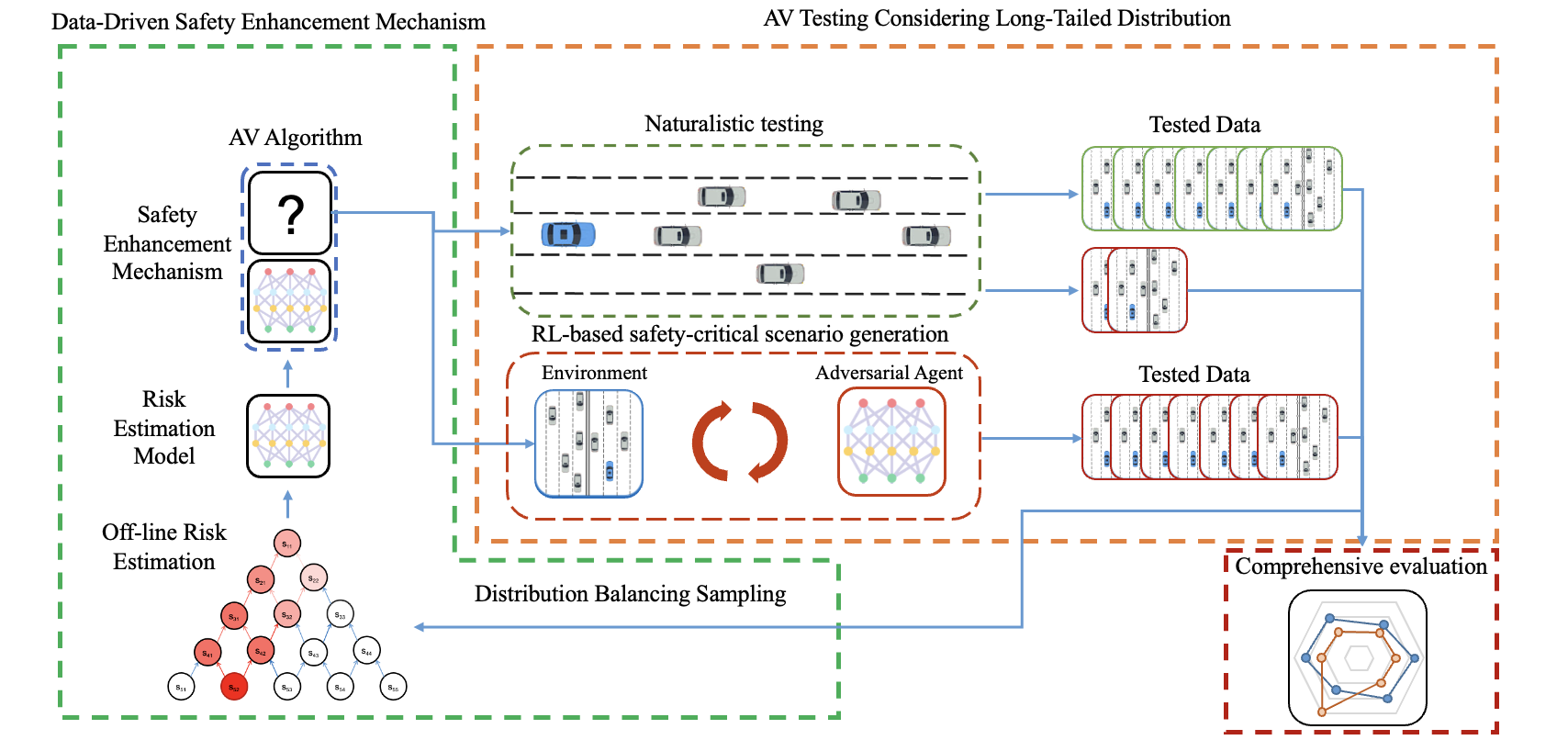
The real world is long-tailed distribution and thus has higher unknowns and complexity. Therefore the safety of decision-making algorithms cannot be fully guaranteed. We propose an online identification method of safety boundaries for arbitrary algorithms to improve their safety in long-tailed distribution. Experiment shows that the proposed method can greatly improve the safety of vehicle when facing unknown and complex scenarios with long-tailed distribution.
Safety Evaluation of Autonomous Driving based on Safety-Critical Scenario Generation (Under Review)
Published in IEEE Intelligent Transportation System Conference, 2024
Due to the rarity of safety-critical scenarios, the safety of autonomous driving decision-making algorithms cannot be fully guaranteed in open environments, which limits their further applications. Therefore, it is crucial to efficiently generate such scenarios for the safety validation of autonomous driving algorithms. To improve the generation efficiency of safety-critical scenarios, we propose an efficient safety-critical scenario generation method combining dynamic and static parameters that constitute a scenario by alternating the optimization of them.To generate dynamic scenario parameters efficiently, a traffic participants model integrating reinforcement learning and prior traffic knowledge is proposed, which is then optimized under the guidance of a prior risk estimation model. For the generation of static scenario parameters, a posterior risk estimation model is proposed, which learns from the explored parameter trajectories during the dynamic scenario generation, to estimate the risk of unknown states. Finally, three different efficiency metrics are proposed and experiments are conducted on rule-based, optimization-based, and learning-based autonomous driving algorithms to verify the high efficiency and generality of the proposed method.Compared with the baseline model that only considers dynamic parameters, the proposed method averagely improves the generation speed by 151.8% and the success rate by 78.7% with only a few alternate optimizations. In addition, the method is generalizable for different types of autonomous driving algorithms. The safety-critical scenario generation paradigm proposed in this paper can greatly accelerate the safety evaluation for any given algorithm, which is of great significance for the development of autonomous driving.
Co-HTTP: Cooperative Trajectory Prediction with Heterogeneous Graph Transformer for Autonomous Vehicles
Published in IEEE Transactions on Intelligent Transportation System Conference, 2024
Due to the rarity of safety-critical scenarios, the safety of autonomous driving decision-making algorithms cannot be fully guaranteed in open environments, which limits their further applications. Therefore, it is crucial to efficiently generate such scenarios for the safety validation of autonomous driving algorithms. To improve the generation efficiency of safety-critical scenarios, we propose an efficient safety-critical scenario generation method combining dynamic and static parameters that constitute a scenario by alternating the optimization of them.To generate dynamic scenario parameters efficiently, a traffic participants model integrating reinforcement learning and prior traffic knowledge is proposed, which is then optimized under the guidance of a prior risk estimation model. For the generation of static scenario parameters, a posterior risk estimation model is proposed, which learns from the explored parameter trajectories during the dynamic scenario generation, to estimate the risk of unknown states. Finally, three different efficiency metrics are proposed and experiments are conducted on rule-based, optimization-based, and learning-based autonomous driving algorithms to verify the high efficiency and generality of the proposed method.Compared with the baseline model that only considers dynamic parameters, the proposed method averagely improves the generation speed by 151.8% and the success rate by 78.7% with only a few alternate optimizations. In addition, the method is generalizable for different types of autonomous driving algorithms. The safety-critical scenario generation paradigm proposed in this paper can greatly accelerate the safety evaluation for any given algorithm, which is of great significance for the development of autonomous driving.
A Safety-Critical Scenario Generation Method for Autonomous Driving Decision-Making Algorithm
Published in CN Patent, 2024
We propose a safety-critical scenario generation method for autonomous driving decision-making algorithms. Given any traffic map and traffic rules, this method can quickly generate high-quality safety-critical scenarios by alternating the dynamic and static parameter optimization, quickly exposing the weakness of the given algorithm and facilitating the comprehensive evaluation of autonomous vehicles.
A Safety-Critical Scenario Generation Software for Autonomous Driving Decision-Making Algorithm
Published in Software Copyright, 2024
We propose a software to generate safety-critical scenarios for the evaluation of autonomous driving decision-making algorithms. Given the map information, traffic rule information, and traffic density information of the test scenarios, the software can quickly generate reasonable, realistic, and diverse safety-critical scenarios for any autonomous driving algorithms, which is conducive to the comprehensive evaluation of algorithm performance.
A Safety-Critical Scenario Generation Software for Autonomous Driving Decision-Making Algorithm
Published in Software Copyright, 2024
We propose a software to generate safety-critical scenarios for the evaluation of autonomous driving decision-making algorithms. Given the map information, traffic rule information, and traffic density information of the test scenarios, the software can quickly generate reasonable, realistic, and diverse safety-critical scenarios for any autonomous driving algorithms, which is conducive to the comprehensive evaluation of algorithm performance.
Safety-Critical Scenario Generation Considering Global Diversity,2024,(underwriting)
Published in Software Copyright, 2024
We propose a software to generate safety-critical scenarios for the evaluation of autonomous driving decision-making algorithms. Given the map information, traffic rule information, and traffic density information of the test scenarios, the software can quickly generate reasonable, realistic, and diverse safety-critical scenarios for any autonomous driving algorithms, which is conducive to the comprehensive evaluation of algorithm performance.